/*
Roverdyn Inc. Timer Interrupt Example.
2024. 7. 15.
MIT License
Copyright (c) 2024. Seonguk Jeong, Roverdyn Inc.
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
SOFTWARE.
*/
#include <zephyr/kernel.h>
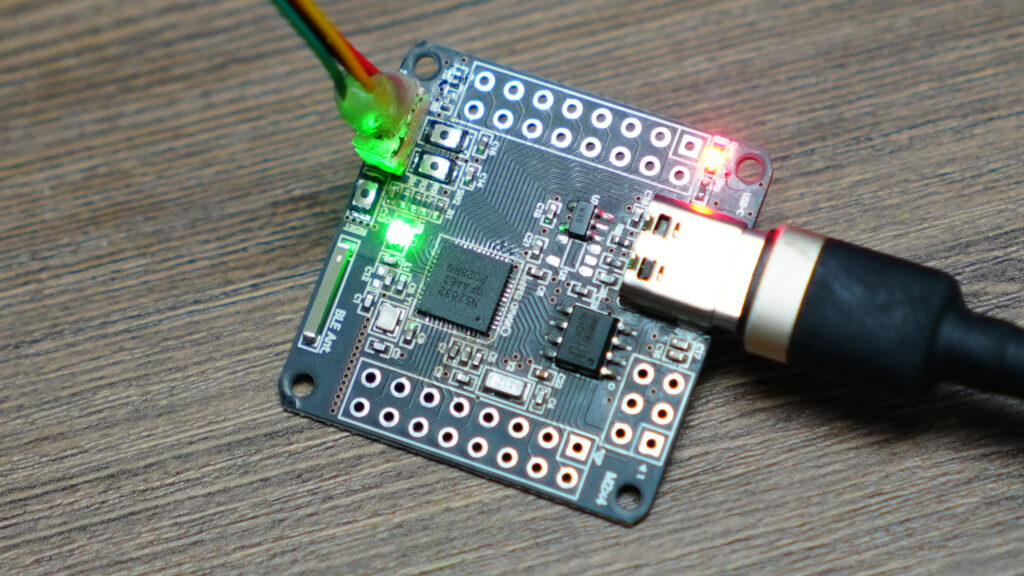
#define GPIO_LED_RED 22
#define GPIO_LED_GREEN 23
#define GPIO_LED_BLUE 24
// Interrupt Handler
void TIMER2_IRQHandler();
int main(void)
{
// GPIO Configuration
NRF_GPIO->DIRSET = (1 << GPIO_LED_RED) | (1 << GPIO_LED_GREEN) | (1 << GPIO_LED_BLUE);
NRF_GPIO->OUTSET = (1 << GPIO_LED_RED) | (1 << GPIO_LED_GREEN) | (1 << GPIO_LED_BLUE);
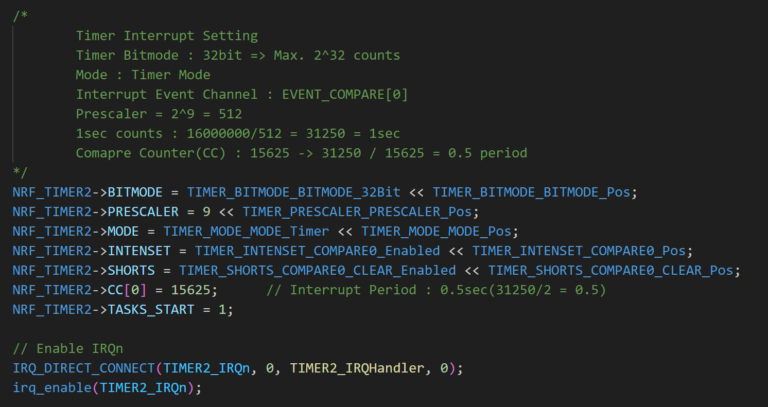
/*
Timer Interrupt Setting
Timer Bitmode : 32bit => Max. 2^32 counts
Mode : Timer Mode
Interrupt Event Channel : EVENT_COMPARE[0]
Prescaler = 2^9 = 512
1sec counts : 16000000/512 = 31250 = 1sec
Comapre Counter(CC) : 15625 -> 31250 / 15625 = 0.5 period
*/
NRF_TIMER2->BITMODE = TIMER_BITMODE_BITMODE_32Bit << TIMER_BITMODE_BITMODE_Pos;
NRF_TIMER2->PRESCALER = 9 << TIMER_PRESCALER_PRESCALER_Pos;
NRF_TIMER2->MODE = TIMER_MODE_MODE_Timer << TIMER_MODE_MODE_Pos;
NRF_TIMER2->INTENSET = TIMER_INTENSET_COMPARE0_Enabled << TIMER_INTENSET_COMPARE0_Pos;
NRF_TIMER2->SHORTS = TIMER_SHORTS_COMPARE0_CLEAR_Enabled << TIMER_SHORTS_COMPARE0_CLEAR_Pos;
NRF_TIMER2->CC[0] = 15625; // Interrupt Period : 0.5sec(31250/2 = 0.5)
NRF_TIMER2->TASKS_START = 1;
// Enable IRQn
IRQ_DIRECT_CONNECT(TIMER2_IRQn, 0, TIMER2_IRQHandler, 0);
irq_enable(TIMER2_IRQn);
while(true){
k_usleep(1); // Wait For Interrupt
}
return 0;
}
void TIMER2_IRQHandler(){
// TIMER2 Interrupt Handler
static bool isLedOn = false;
if(NRF_TIMER2->EVENTS_COMPARE[0] == 1){
NRF_TIMER2->EVENTS_COMPARE[0] = 0;
if(!isLedOn){
isLedOn = true;
printk("LED On : Green\n");
NRF_GPIO->OUTCLR = (1 << GPIO_LED_GREEN);
}else{
isLedOn = false;
printk("LED Off : Green\n");
NRF_GPIO->OUTSET = (1 << GPIO_LED_GREEN);
}
}
}