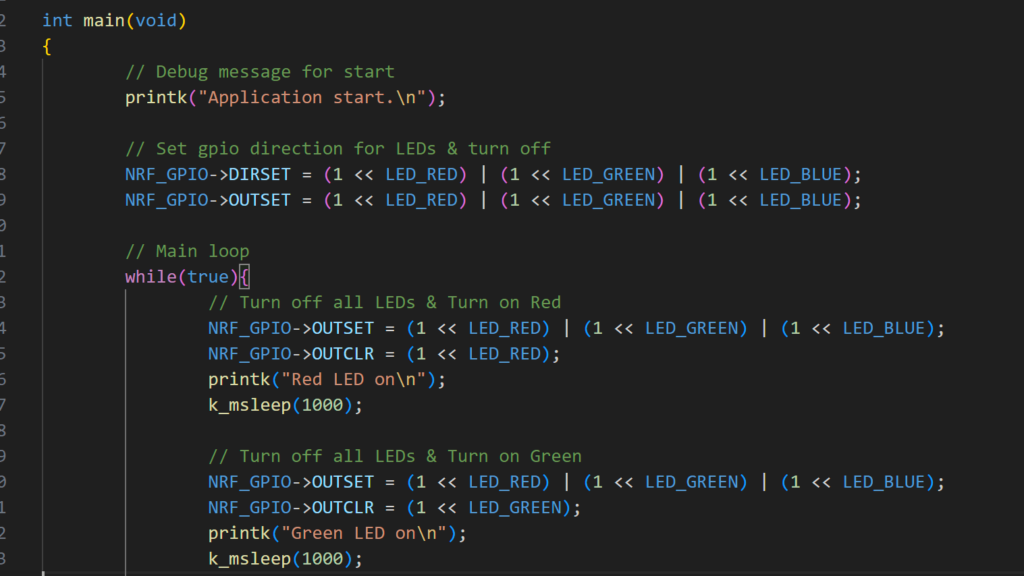
GPIO의 레지스터는 몇 가지 설정을 하여 사용할 수 있습니다. 다음은 기본적인 GPIO의 설정입니다.
- NRF_GPIO->DIRSET : 핀의 출력 방향을 설정합니다.
- NRF_GPIO->OUTSET : 핀을 출력으로 설정하였을 때 핀을 High로 설정합니다.
- NRF_GPIO->OUTCLR : 핀을 출력으로 설정하였을 때 핀을 Low로 설정합니다.
GPIO 레지스터의 값을 입력하기 위해서는 설정하고자 하는 핀의 비트를 0 혹은 1로 설정하여 제어할 수 있습니다. 이를 확인하기 위해 먼저 nRF52 시리즈의 데이터 시트를 확인합니다.

위 데이터시트는 nRF52832의 데이터시트입니다. GPIO 레지스터 챕터에서 확인할 수 있는 내용으로, NRFGPIO->DIRSET 레지스터에 관한 내용입니다. 해당 데이터시트를 자세히 보면 Bit number가 0인 부분의 아이디는 ‘A’로 표시되어 있으며, 해당 비트를 0으로 설정하면 해당 핀(PIN0)을 Input으로 설정하고 1로 설정하면 Output으로 설정됩니다. 만약 22번핀(P0.22)를 출력으로 설정하고자 한다면 NRF_GPIO->DIRSET = (1 << 22) 으로 설정하면 위 데이터시트상 ID가 ‘W’인 22번 핀의 입출력 방향이 출력으로 설정됩니다. 만약 중복으로 설정하고자 한다면 Or(|) 연산자를 붙여 설정하면 됩니다.
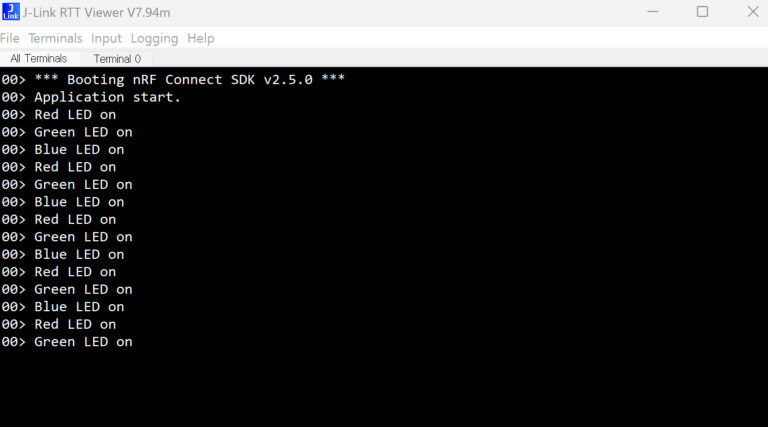
Zephyr RTOS는 간단한 Sleep 함수가 있습니다. 메인 쓰레드에서 사용할 수 있는 k_msleep 이라는 함수는 매개 변수로 밀리초(ms) 단위로 입력받아 CPU의 동작을 중지 시킬 수 있습니다. 예를 들어 k_msleep(1000)으로 설정하면 1초간 지연 시킨다는 뜻입니다. 또 다른 함수로는 k_usleep이 있으며 k_msleep 함수와 비슷하지만 매개 변수로는 마이크로초 단위(us)를 입력 받습니다.
보다 자세한 내용은 아래 소스코드를 참조해주세요.
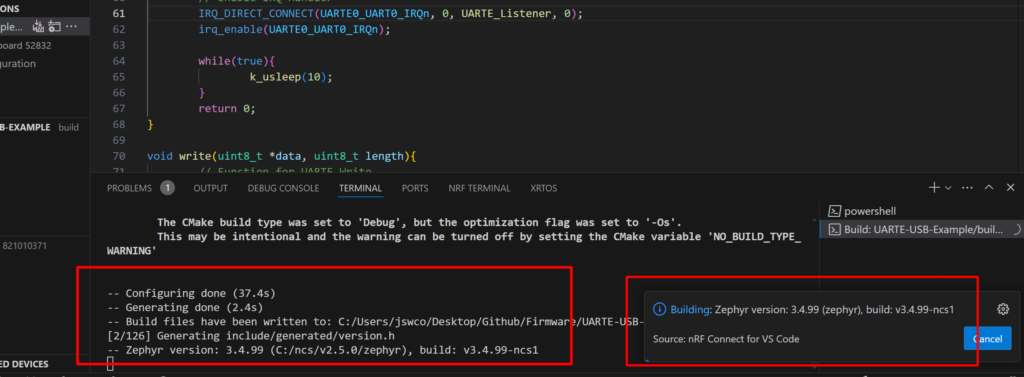
작성한 소스 코드는 빌드 및 컴파일을 한 후 최종적으로는 디버거 혹은 프로그래머 장비를 이용하여 개발 보드에 다운로드할 수 있습니다. 개발 보드에 관한 설정은 “nRF52 개발환경 구축하기” 튜토리얼을 확인하여 설정할 수 있습니다.
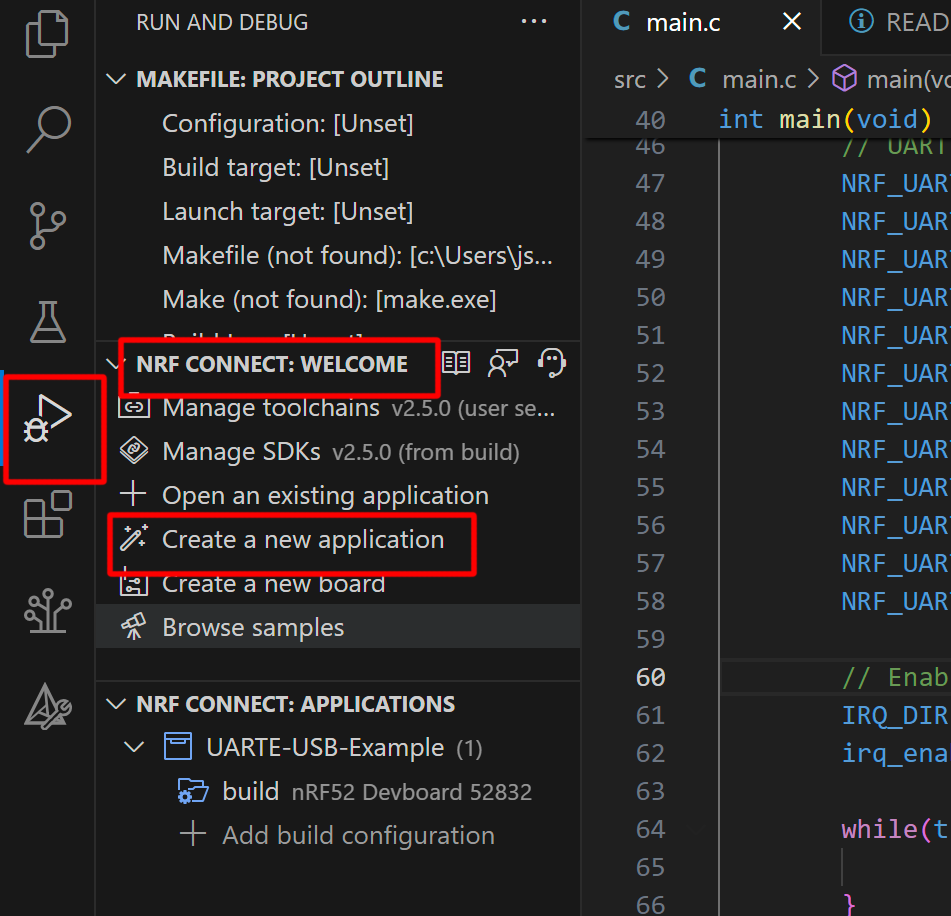
작성한 코드를 빌드하기 위해서는 우선 다운로드 하고자 하는 보드를 설정해주어야 합니다. 대상 보드를 정의하기 위하여 좌측 패널의 메뉴 중 “Run and Debug” 메뉴를 클릭한 후 “NRF CONNECT:WELCOME” 패널 내부의 “Create a new board” 메뉴를 클릭합니다.
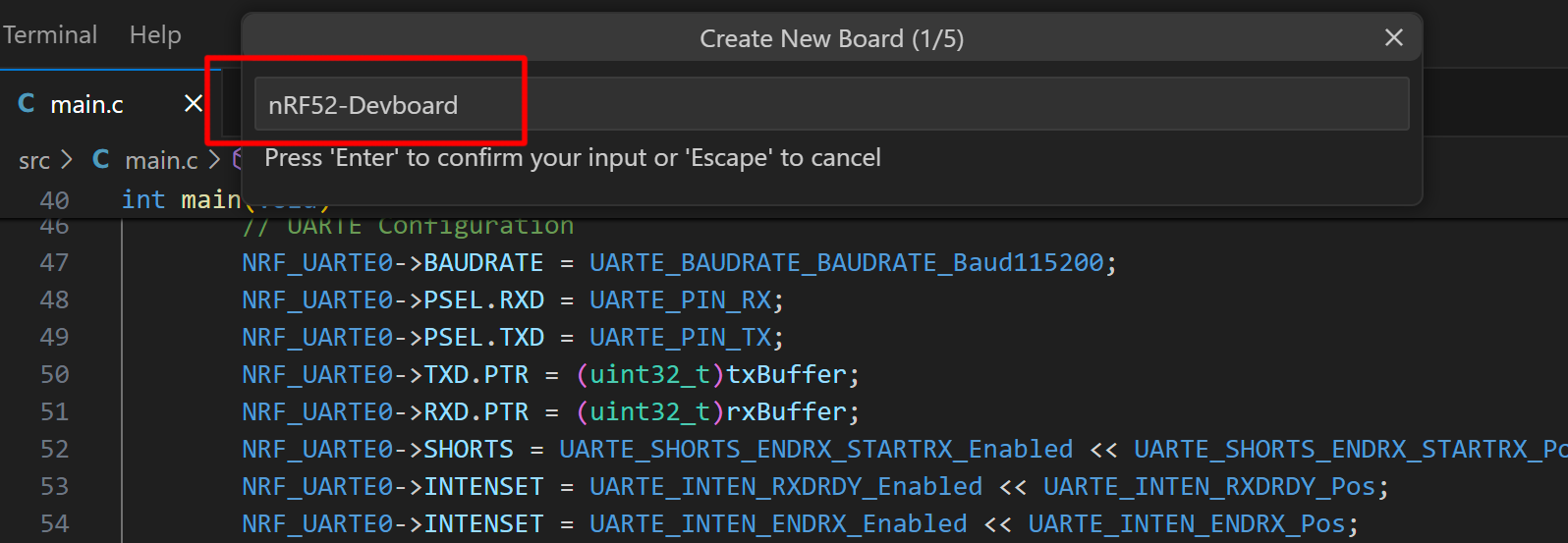
화면 상단에 패널이 나타나면 새로운 보드의 이름을 작성한 후 엔터키를 눌러줍니다. 보드의 이름은 영문으로 작성하여야 합니다.
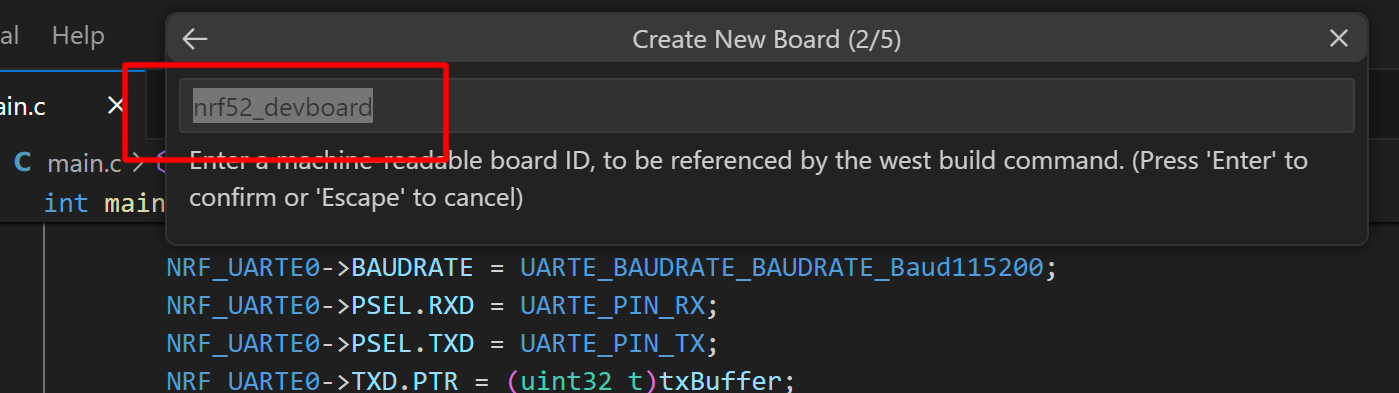
다음으로 보드의 이름을 한번 더 작성합니다. 다만 이 이름은 기계가 인식할 수 있는 방법으로 작성합니다. 대게 자동으로 작성되어 있으므로 엔터키를 눌러 다음으로 넘어갑니다.
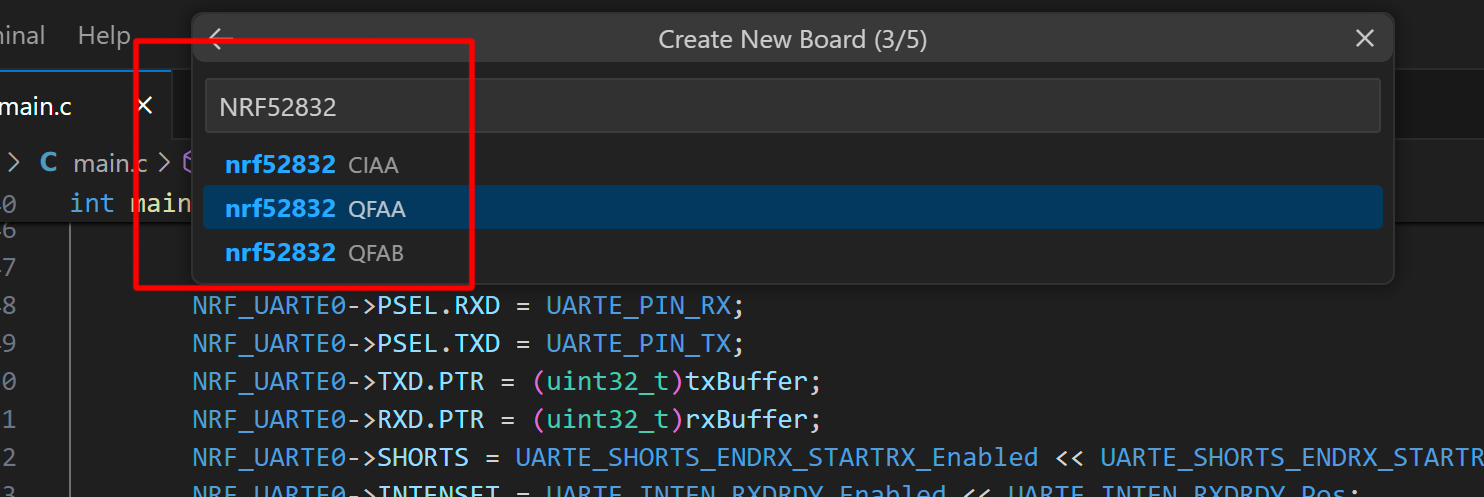
보드가 사용하는 MCU의 종류를 입력합니다. nRF52 개발 보드는 nRF52810-QFAA 혹은 nRF52832-QFAA 두 종류를 사용합니다.
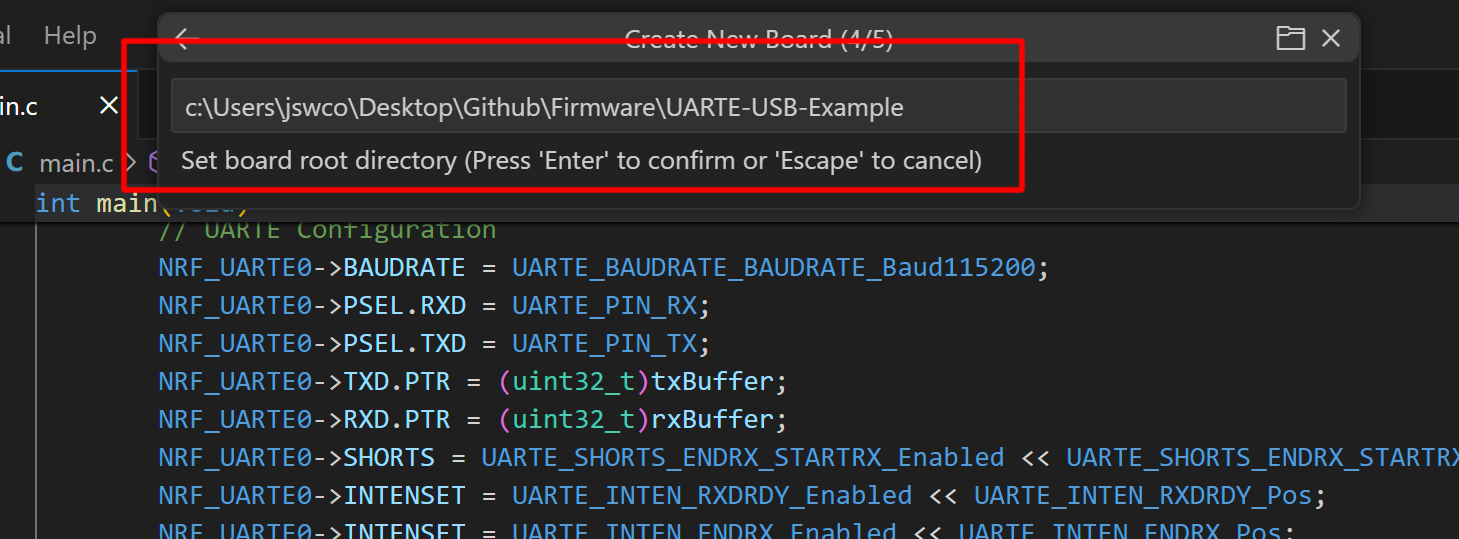
새로 작성한 보드의 정보가 저장될 위치를 설정합니다. 기본적으로 프로젝트 내부의 “board” 폴더가 지정되어 있습니다.
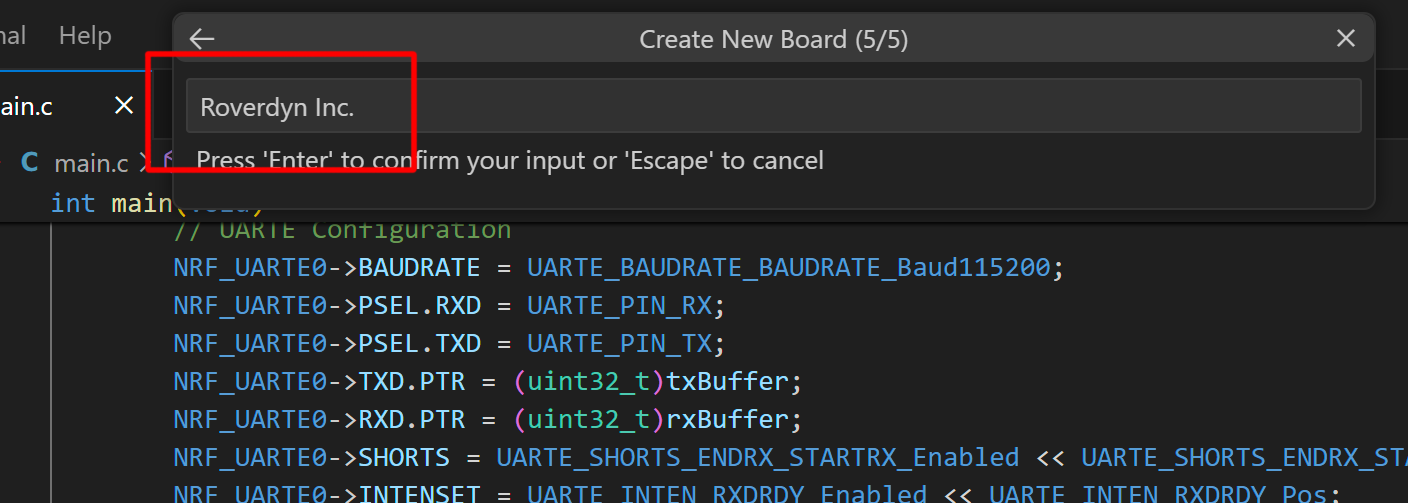
마지막으로 보드의 제조사를 설정합니다. 해당 내용은 작성하지 않아도 동작에 지장이 없습니다.
위와 같이 새 보드의 정의 및 파일 생성이 완료되었다면 빌드 환경을 구성할 수 있습니다. 빌드 환경은 위의 보드 추가 방법과 같이 동일한 “Run & Debug” 패널의 “NRF CONNECT: APPLICATION” 항목에서 설정할 수 있습니다.
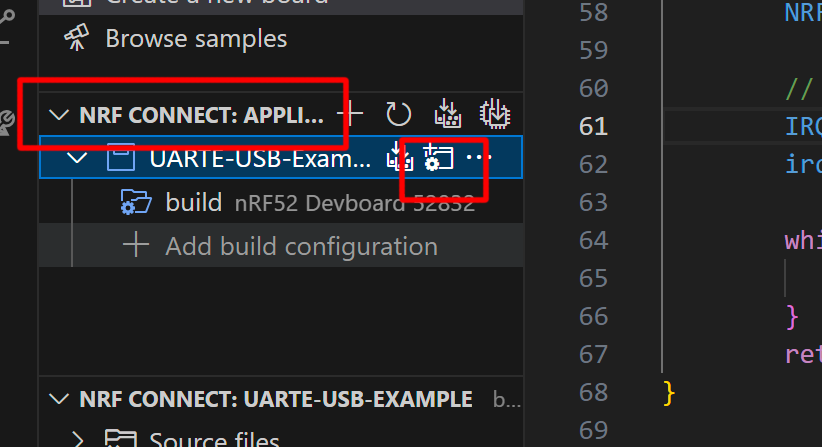
APPLICATION 패널 중 우측에 위치한 “Add Build Configuration” 아이콘을 눌러 설정창을 열어줍니다.
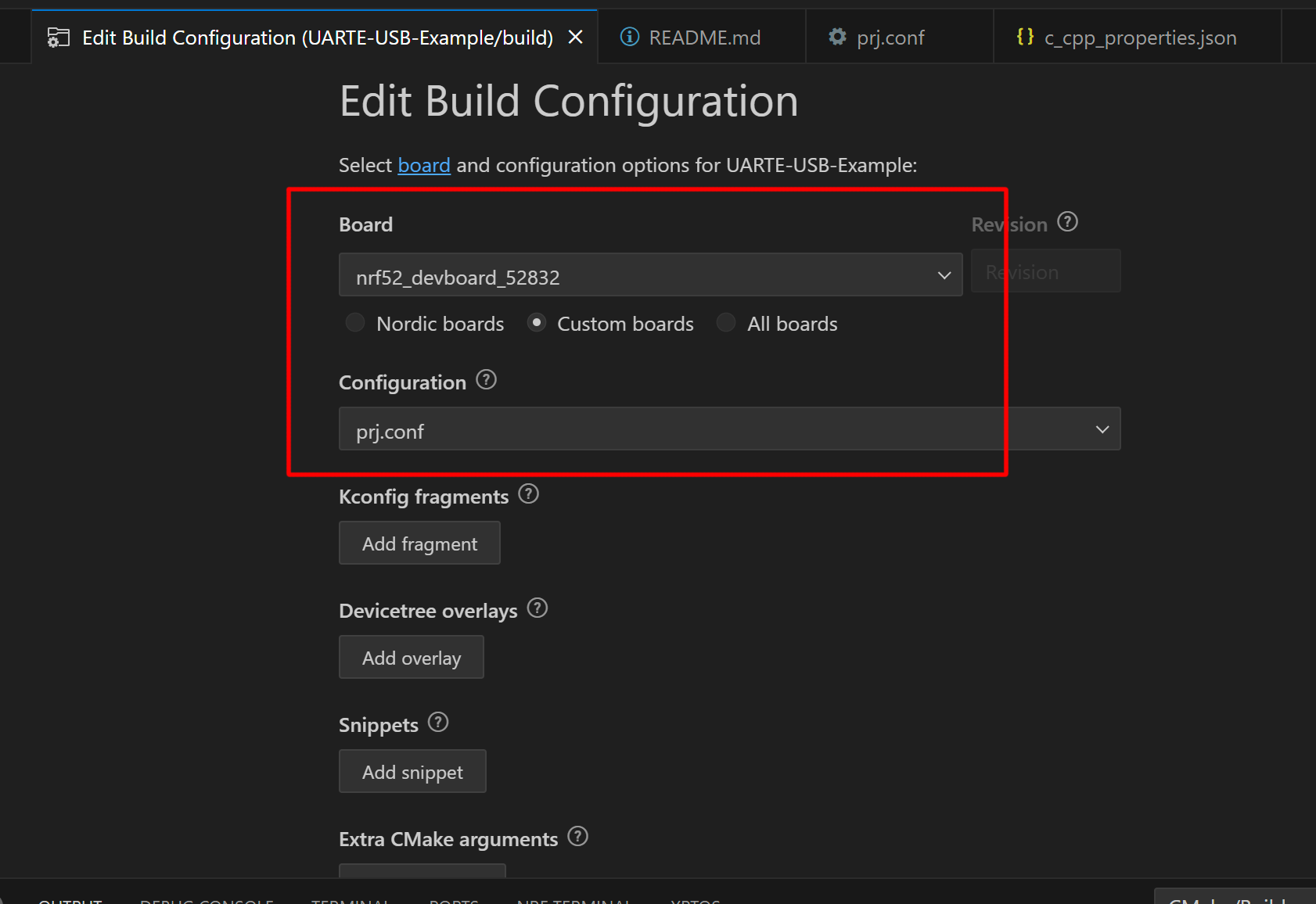
빌드 환경 설정 창이 나타나면 위 그림과 같이 “Custom board” 항목을 눌러준 다음 이전에 생성한 보드를 선택합니다. 위 예제에서는 “nrf52_devboard_52832” 항목을 선택하였습니다. 이는 사용자가 만든 보드 이름에 따라 달라질 수 있습니다. 또한 Configuration 항목을 prj.conf 로 선택합니다. 이후 우측 하단의 “Build configuration” 버튼을 눌러 빌드 환경을 구성합니다.
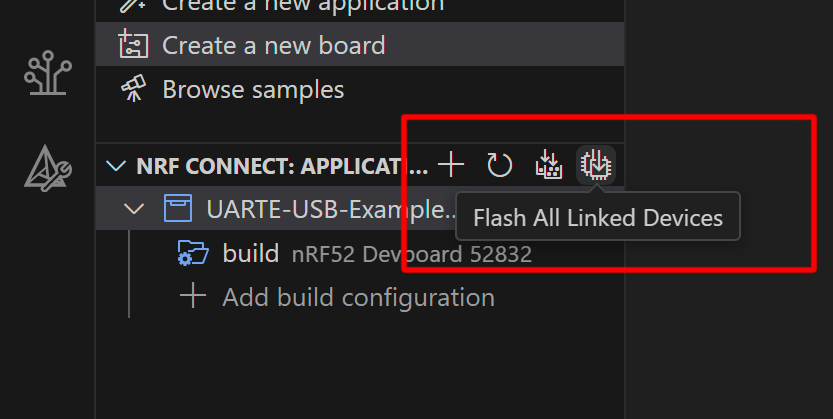
이상 없이 빌드가 완료되었다면 다시 APPLICATION 패널로 이동하여 “Flash All Linked Devices” 항목을 눌러 컴파일된 펌웨어의 다운로드를 시작합니다. 이 때, 타겟 보드는 컴퓨터와 Jlink 혹은 기타 디버거, 프로그래머와 연결이 되어 있어야 합니다.